本文最后更新于 about 3 years ago,文中所描述的信息可能已发生改变。
施工中
内容参考:
- 《深度学习入门:基于 Python 的理论与实现》(斋藤康毅)
- 上述书籍作者提供的代码
参数的更新
实际问题中参数空间可能非常复杂,很难快速找到最优解。
SGD
SGD 的策略很好理解,就是沿着梯度方向更新参数,寻找使损失函数值尽可能小的参数。可以写成如下式子:
其中 表示要更新的权重参数, 是损失函数关于 的梯度, 表示学习率(一般取0.1或0.01等事先确定的值)。
将 SGD 的方法用类的形式实现:
class SGD:
def __init__(self, lr=0.01):
self.lr = lr # 学习率
def update(self, params, grads):
for key in params.keys():
params[key] -= self.lr * grads[key]SGD 可以作为代码中的 optimizer 来进行参数更新。只要不同的最优化方法都实现 update(params, grads),就可以用 optimizer.update(params, grads) 的形式在代码中完成更新参数的步骤。
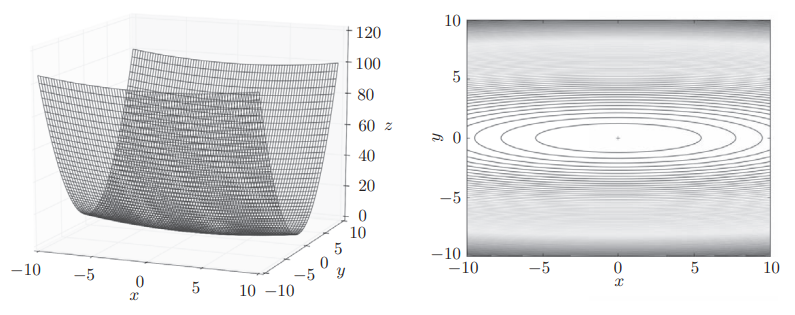
从上面可以看出,SGD 的实现也很简单。然而在某些情况下(比如梯度并没有指向最小值的方向),SGD 的效率并不理想。例如,对于函数 ,它的函数图形和等高线如图所示:
梯度如图所示:
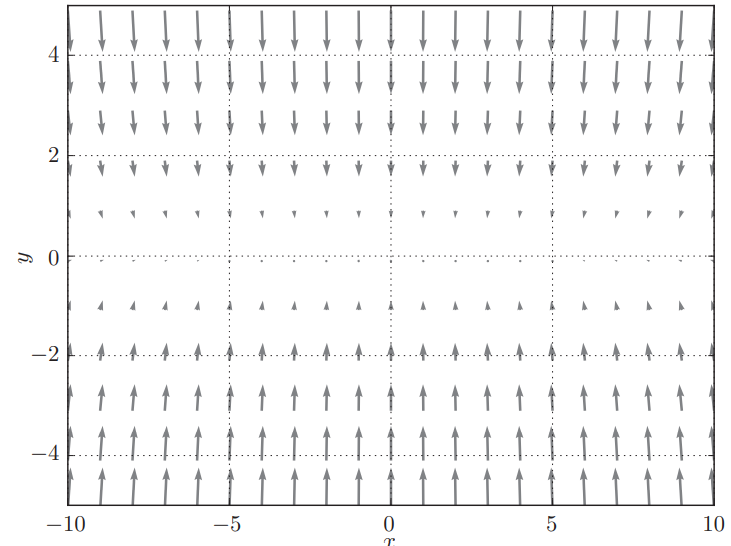
显然函数在 处取得最小值,但是在很多地方,梯度并不指向 。对这个函数使用 SGD,比方说从 处开始搜索,更新路径会像这样:
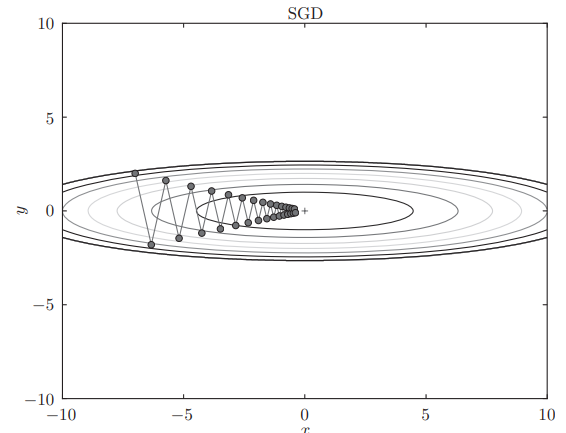
由于很多地方的梯度不指向 ,这个更新路径呈“之”字形,显然不是很理想,效率不高。所以我们需要其他的更新方法。
Momentum
Momentum 方法引入了“速度”,“速度”的更新可以看作物体在梯度方向上受力:
在物体不受力时会使速度衰减( 一般取零点几的值),可以看作空气等带来的阻力。
Momentum 方法的代码实现:
class Momentum:
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val) # “速度”的形状与参数相同
for key in params.keys:
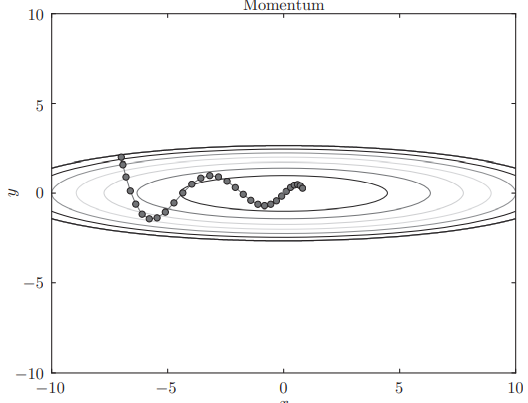
self.v[key] = self.momentum * self.v[key] - self.lr * grads[key]
params[key] += self.v[key]对于之前的问题,Momentum 方法的更新路径:
AdaGrad
AdaGrad 方法基于“学习率衰减”的想法:随着学习的进行,使学习率逐渐减小。实际上,AdaGrad 方法在学习过程中会为参数的每个元素调整学习率。
表示对应矩阵元素的乘法, 表示以前所有梯度值的平方和。显然参数中变动较大的元素的学习率会变得更小(准确地说是学习率会被乘以一个更小的因数)。
实现过程:
class AdaGrad:
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7) # 1e-7避免将0用作除数这个方法在 中的更新路径:
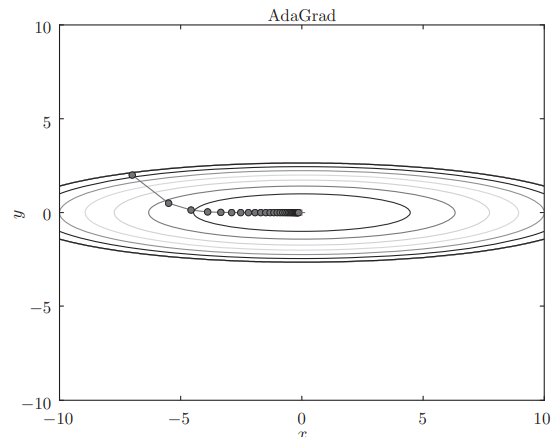
因为 y 方向的更新幅度较大,在这个方向上的学习率衰减也就更明显。
当然还有别的方法,比如融合了 Momentum 和 AdaGrad 的 Adam 方法,就不再说明了。(因为原书中也只给了相关论文和代码实现。)
使用不同的方法可以得到不同的更新路径,对于前面的问题来说 AdaGrad 能得到比较理想的路径,但如果换一个问题,可能其他方法会有更好的结果。(那是自然。)
权重的初始值
初始值可以为0吗
权值衰减是一种抑制过拟合的技巧,它以减小权重参数的值为目的进行学习。如果想减小权重,最好的方法是一开始就把权重设定为较小的值。那把权重的初始值设为0(说到更普遍的情况,其实是把权重初始值设置为一样的值)呢?
考虑误差反向传播就可以发现,将权重初始值设置为一样的值,反向传播时也会被更新为一样的值。都是一样的值的话神经网络为什么要有许多权重呢?
原来如此,所以必须随机生成初始值!
隐藏层的激活函数层的分布
这里书上举的例子就不那么详细地复述了……
向一个5层神经网络传入随机生成的输入数据,激活函数使用 sigmoid 函数,权重使用标准差为1的高斯分布随机生成,用直方图绘制出各层激活值(激活函数的输出)的分布:
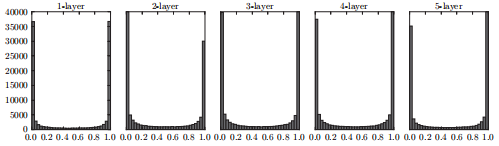
可以发现,各层的激活值都集中在0和1附近。对于 sigmoid 函数,在0和1附近的导数都比较接近0,那么这样的数据会造成反向传播中梯度的值不断变小,也就是所谓“梯度消失”
如果将权重的标准差设为0.01,各层的激活值分布就会变成:
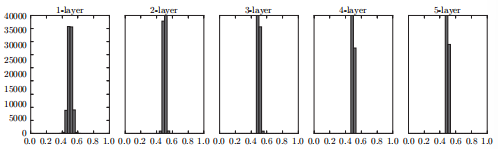
激活值集中在0.5附近,不会有梯度消失的问题,但是分布太过集中。显然不能让几乎所有的神经元都输出一样的值,实际应用中一般使用“Xavier 初始值”,可以避免这些问题。
Xavier 初始值控制权重尺度(标准差)的方式是:如果前一层的节点数为n,则初始值使用标准差为 的分布。
实现方式可以是:
pre_node_num = 100 # 前一层的节点数
w = np.random.randn(pre_node_num, node_num) / np.sqrt(pre_node_num)使用 Xavier 初始值得到的各层激活值分布:
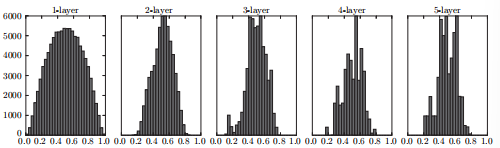
比之前的分布更有广度。
如果用 tanh 函数(双曲线函数)代替 sigmoid 函数,可以改善后面的层激活值歪斜的问题。
ReLU 的权重初始值
Xavier 初始值是以激活函数是线性函数为前提而推导出来的。因为 sigmoid 函数和 tanh 函数左右对称,且中央附近可以视作线性函数,所以适合使用 Xavier 初始值。但当激活函数使用 ReLU 时,一般推荐使用 ReLU 专用的初始值,也就是 Kaiming He 等人推荐的初始值,也称为“He 初始值”。当前一层的节点数为 n 时,He 初始值使用标准差为 的高斯分布。当 Xavier 初始值是 时,(直观上)可以解释为,因为 ReLU 的负值区域的值为0,为了使它更有广度,所以需要2倍的系数。
用作者给出的 ch06/weight_init_compare.py 可以比较使用不同权重初始值时神经网络的学习情况。
Batch Normalization
前面调整权重的初始值是为了使各层的激活值分布有合适的广度,还有一种办法可以“强制性”地调整激活值的分布来达到这个目的。
Batch Norm 算法(前向传播)
Batch Norm有以下优点。
- 可以使学习快速进行(可以增大学习率)。
- 不那么依赖初始值(对于初始值不用那么神经质)。
- 抑制过拟合(降低Dropout等的必要性)。
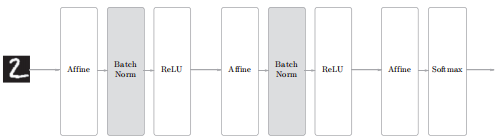
Batch Norm 的思路是调整各层的激活值分布使其拥有适当的广度,为此需要在神经网络中插入对数据分布进行正规化的层(Batch Norm层):
Batch Norm 是以学习时的 mini-batch 为单位,按 mini-batch 进行正规化,数学式表示:
对 mini-batch 的 m 个输入数据的集合 求均值和方差 。然后,对输入数据进行均值为0、方差为1(合适的分布)的正规化。其中 是一个微小值。
Batch Norm 层会将正规化后的数据进行缩放和平移的变换:
一开始参数 ,,可以通过学习调整到合适的值。