本文最后更新于 over 4 years ago,文中所描述的信息可能已发生改变。
你是否经常感到空虚寂寞、百无聊赖?你是否缺少陪伴、倍感不安、想要在这喧嚣的城市里寻找一份慰藉?
毫无疑问,拥有属于自己的车、房可以在物质层面缓解这些焦虑(确信)。买房太难了,所以就先从车开始吧。
三轮车也是车
打住,我要说的并不是这种车:


或者这种车:

废话,你以为我买得起?
而是这种:
什么?这不行?气抖冷,难道三轮车就不是车?玩具车就不能给慰藉了?
从零(并不是)开始的造三轮生活
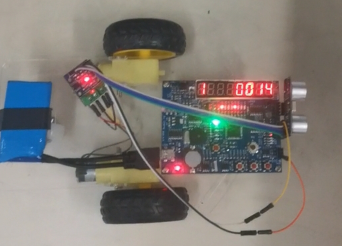
是这样的,我想搞个小车已经很久了,大概大半年了?早早地就从某宝上买了亚克力板和电机、轮子(所以不算从零开始),准备大干一番,却一直没有动手。因为之前没有接触过单片机,丝毫没有头绪。(懒)
事情的转机出现在今年夏季小学期,我们要基于单片机学电子系统设计了。狂喜,有人教了。于是在焊完板子学了一些案例后我们就放假回家了,老师特意说要自己想想选题(不过很多人不一定想了)嗯?这还用想?做车啊!
虽然这样说,我还是等到了暑假的最后一周才开始动手。
电机驱动
对于车来说,最基本的是什么?当然是能跑。所以我首先测了电机能不能转。
我用的板子就是之前蜂鸣器唱《国际歌》的那块,芯片型号是 IAP15F2K60S2(基本等同于STC15F2K60S2)。板子上有三个拓展接口:EXT、SM 和 485。大概长这样:
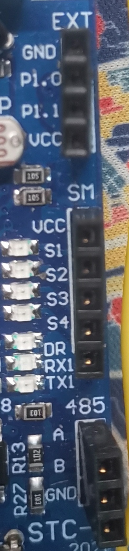
最适合拿来控制两个电机的当然是 SM (步进电机)接口,给了一个 VCC 和四个引脚输出(EXT 接口蓝牙要用,485 只给了两个引脚和 GND)。直接把电机接到 VCC 和另一个引脚,没问题,但是接两个引脚给高低电平电机就不转,设推挽输出也没用,我是没想明白怎么回事。实在太逊了,这个样子连电机反转都搞不了,还怎么跑两个电机啊?
办法总比困难多,博闻强识的我(大嘘)怎么能想不到解决方案呢?好吧,其实是搜索引擎帮大忙。我借助了双路 L9110S 电机驱动来控制电机。
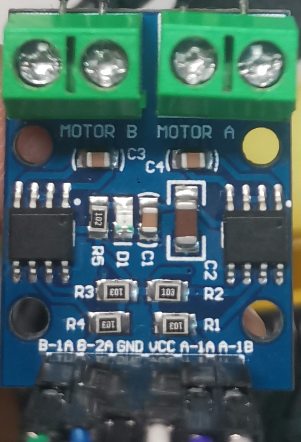
这样就可以做到用 SM 的 VCC 和 485 的 GND 供电,用 S1 到 S4 控制两个电机。四个引脚分别接图里下方的 A-1A 这些。A-1A 和 A-1B 控制 Motor A,Motor A连接到一个电机的两端,Motor B 同理。嗯,完美解决。
让小车按命令动起来的话当然要写程序了,先给小车运动状态的基本定义:
#ifndef _MOVE_H
#define _MOVE_H
#include "STC15F2K60S2.H"
// 接电机的引脚
sbit s1 = P4 ^ 1;
sbit s2 = P4 ^ 2;
sbit s3 = P4 ^ 3;
sbit s4 = P4 ^ 4;
// 电机转动方向
#define RightMotorStop s1 = 0, s2 = 0
#define LeftMotorStop s3 = 0, s4 = 0
#define RightMotorFWD s1 = 1, s2 = 0
#define LeftMotorFWD s3 = 1, s4 = 0
#define RightMotorREV s1 = 0, s2 = 1
#define LeftMotorREV s3 = 0, s4 = 1
// 运动和停止
void Forward();
void Backward();
void TurnLeft();
void TurnRight();
void VStop();
// 初始化
void MoveInit();
#endif分别给高低电平应该能看懂吧?
函数实现:
#include "move.h"
// 前进
void Forward()
{
LeftMotorFWD;
RightMotorFWD;
}
// 后退
void Backward()
{
LeftMotorREV;
RightMotorREV;
}
// 左转
void TurnLeft()
{
LeftMotorREV;
RightMotorFWD;
}
// 右转
void TurnRight()
{
LeftMotorFWD;
RightMotorREV;
}
// 停车
void VStop()
{
LeftMotorStop;
RightMotorStop;
}
// 初始化,s1 到 s4 推挽输出
void MoveInit()
{
P4M0 = 0xff;
P4M1 = 0x00;
//P0 = 0;
VStop();
}我觉得这些都算得上言简意赅(叉腰),就不多解释了。
蓝牙遥控与串口通信
小车能动了,但是我们还需要控制。我最开始的想法就是做遥控,能用手机直接遥控就再好不过了。手机遥控?那就用蓝牙!
遥控器程序去手机的应用商店里搜“蓝牙串口”,最好是带按钮编辑的那种,一搜一大把,所以就先不关心了。
小车的蓝牙接收我是用 HC-06 来做的。
老师给出的样例里面有用到蓝牙串口通信的,遂“参考”之。
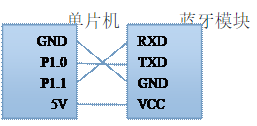
STC15F2K60S2 系列单片机有2个高速异步串行通信端口,每个串口由2个数据缓冲器、一个移位寄存器、一个串行控制寄存器和一个波特率发生器等组成。
串口1已被用于下载电路,故本案例使用的是串口2来进行与蓝牙的通信。从芯片引脚电路图中,我们可以找到串口2对应的收发引脚分别为 P1.0 和 P1.1,将其的“接受”端和蓝牙模块的“发送”端相连,“发送”端和蓝牙模块的“接收端”端相连,再对应连接 VCC 和 GND 即实现了物理上电路的连通。
串口2只能使用定时器2作为波特率发生器,根据芯片使用手册的说明设置好定时器后,只要将要发送的数据写到 SBUF2 中,串口即自动发送缓存中的数据。
——湖大超星 电子系统设计与创新基础训练 基于Andriod的数据采集系统
如上所示,使用串口2进行蓝牙通信,串口2只能用定时器2作为波特率发生器,所以先初始化定时器:
void Uart2Init(void) // [email protected]
{
S2CON = 0x50; // 8位数据,可变波特率
AUXR |= 0x04; // 定时器2时钟为Fosc,即1T
T2L = 0xE0; // 设定定时初值
T2H = 0xFE; // 设定定时初值
AUXR |= 0x10; //启动定时器2
IE2 = 0x01;
P_SW2 = 0x00;
EA = 1;
}前面有注释的都是 STC-ISP 软件自动生成的,最后三句大概是中断使能、外设切换等~~,没怎么看懂~~。
然后是用于读取串口2接收数据的中断函数:
void UART2_Interrupt() interrupt 8 // 中断8,用于串口2
{
unsigned char temp;
// 检查串口2控制寄存器
// 将1字节的新数据赋给 ReceivedData
if((S2CON&0x01)==0x01)
{
S2CON &= ~0x01;
temp = S2BUF;
ReceivedData=temp;
}
}这里似乎可以不用 temp。
ReceivedData 是个 unsigned char 型的全局变量。在手机的蓝牙串口应用里编辑按钮发送不同数据,根据 ReceivedData 来调用小车的运动控制函数就能实现遥控。这部分程序就不写出来了,switch 或者 if 判断就行。
现在一看好简单啊!那为什么我暑假里写了好几天?
当你拥有了现成的轮子
这部分可能不太具有复现性(湖大信息院学生除外,毕竟有老师给的 BSP)。
上面这些是在八月的最后两三天完成的,一边摸鱼一边写程序,算是完成了蓝牙遥控小车的功能,想着就这样吧,也算个设计了,就这样交差。
令我没想到的是,暑假回来之后的下半个小学期,老师给出了一套功能完备的 BSP (Board Support Package,板级支持包),里面有板子上各种外设的驱动程序。比方说要让数码管显示一个数字,原来你需要这样:写段选、写位选、设置推挽输出、引脚赋值、循环内刷新……现在你只需要这样:
DisplayerInit(); // 显示模块初始化
SetDisplayerArea(7, 7); // 只用数码管最后一位
Seg7Print(0, 0, 0, 0, 0, 0, 0, 1); // 数码管最后一位显示1初始化之后想显示什么直接调用 Seg7Print() 就行,十分快捷。
有了这样一套轮子,大家想做什么直接调库函数就行,完全不需要向我之前那样从定时器和中断开始写。于是同学们纷纷变身缝合怪,恨不得把所有模块都加到自己的设计中。
坏了,卷起来了。
没办法,我也只能多搞点东西了。先把蓝牙遥控换成了 BSP 的实现,加了上锁功能。此外在小车上加什么好呢?在咨询了隔壁老王后,我确定了“超声波”这个方向,避障什么的自然是少不了,跟随式行李箱也有点意思。完成这些之后我又附加了一个红外遥控的模式。
嗯……比我的最初想法丰富多了……
车身功能
程序构成
小车整体的思想是依托 BSP 提供的设置事件回调函数的功能,持续获取外部和车身命令,维护几个系统变量,根据命令和这些变量判断当前小车应该执行的动作。
就没必要给整体流程图了吧?
由于 BSP 是学校老师写的,且其中函数实现被封装进了库文件,我就不太好意思上传了,只讲一下整体的结构和我自己写的函数吧。
系统变量和函数声明
// main.h
// 老师写的数码管显示码表就略过了
/**
* 提供四种模式:
* 1. 红外遥控
* 2. 蓝牙串口遥控
* 3. 超声波避障
* 4. 跟随/保持距离
* 其中红外和蓝牙串口模式的运动状态均由 Remote() 控制
* 避障模式的运动状态由 AutoMove(int i) 控制,跟随模式的运动状态由 Follow(int i) 控制
* 系统利用 TenMsCallback(),每 10ms 进行运动控制,根据当前模式调用上述三个函数中的一个
*/
unsigned char rxd[2]; // 红外和蓝牙接收的数据
unsigned char rxdHead = 0xFA; // 蓝牙校验,为配合红外的数据头校验,不特意使用 SetUart2Rxd() 设置
unsigned char flag; // 标志位,是否允许操作,为1时允许操作
unsigned char speedState; // PWM 控制标志
unsigned char speedControl; // 速度控制参数,将电机转速降为全速的 1/speedControl
unsigned char speedLevel; // 速度档位,数字越大速度越快
unsigned char dirFlag; // 避障转向选择
unsigned char mode; // 模式标志
void ChangeSpeed(); // 更改速度档位
void Remote(); // 遥控
void AutoMove(int i); // 避障
void Follow(int i); // 维持距离
void ModeBTRemote(); // 蓝牙遥控模式初始化
void ModeIRRemote(); // 红外遥控模式初始化
void ModeAuto(); // 避障模式初始化
void ModeFollow(); // 跟随&控制距离模式初始化
void SwitchModes(); // 切换模式
void KeyCallback(); // 按键事件回调函数
void Uart2Callback(); // 蓝牙接收数据回调函数,仅处理解锁上锁,运动控制被 TenMsCallback() 接管
void IRCallback(); // 红外接收数据回调函数,仅处理解锁上锁,运动控制被 TenMsCallback() 接管
void TenMsCallback(); // 10ms 回调,实现电机转速控制以上函数均在 main.c 中实现,下面出现的没有在此处声明的函数都来自老师的 BSP。
系统初始化
void main()
{
Key_Init(); // 按键初始化
DisplayerInit(); // 显示模块初始化
SetDisplayerArea(0, 7); // 使用数码管范围
BeepInit(); // 蜂鸣器初始化
SetEventCallBack(enumEventKey, KeyCallback); // 设置按键回调函数,本机按键包括模式切换和上锁解锁
SetEventCallBack(enumEventSys10mS, TenMsCallback); // 每 10ms 进行运动控制
speedState = 1; // 给PWM控制位赋初值
speedLevel = 1; // 默认速度档位
flag = 1; // 启动时未上锁
MoveInit(); // 设置 s1 到 s4 推挽输出
ModeIRRemote(); // 默认启动红外遥控模式,即模式0
MySTC_Init();
while (1)
{
MySTC_OS();
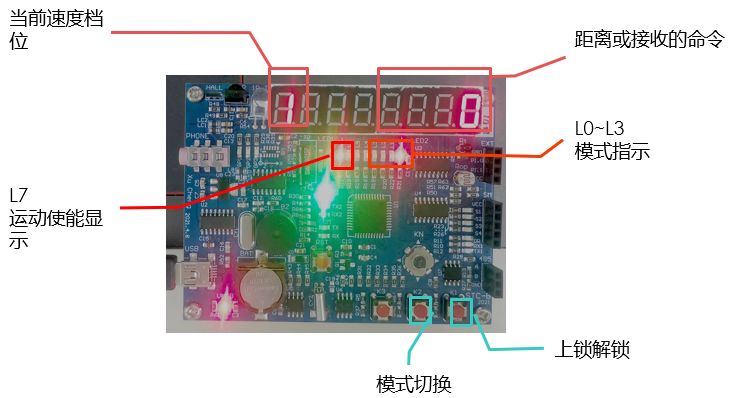
LedPrint((flag << 7) + (1 << mode)); // 用 LED7 显示 flag 状态,亮起时表示未上锁
// LED0、1、2、3分别表示模式0、1、2、3
}
}车身按键功能
// 按下车机按键的回调函数
void KeyCallback()
{
// 按下 key1 上锁解锁
if (GetKeyAct(enumKey1) == enumKeyPress)
{
VStop();
flag = !flag;
}
// 按下 key2 切换模式
if (GetKeyAct(enumKey2) == enumKeyPress)
{
VStop();
SwitchModes();
}
}运动控制中枢
直接控制电机的函数就是之前写的那些。
设置系统 10ms 事件回调函数来控制运动:
// 简单的 PWM,将电机转速控制为全速的 1/speedControl
void TenMsCallback()
{
if (flag) // 未上锁
{
if (!speedState)
{
switch (mode) // 根据当前模式选择运动控制函数
{
case 0:
Remote();
break;
case 1:
Remote();
break;
case 2:
AutoMove(GetUltraSonic());
break;
case 3:
Follow(GetUltraSonic());
break;
default:
break;
}
}
else
VStop();
if (++speedState >= speedControl)
speedState = 0;
}
}在程序中,0 <= speedState < speedControl。系统每次执行回调函数 speedState 会自加,超出范围后再赋值为0。只有在 speedState 为0时小车才会运动。
系统每执行 speedControl 次回调函数,只会有一次允许小车运动,即调整速度为全速的 1/speedControl。改变 speedControl 的值即可改变速度:
// 调整速度,speedControl 的值是 3或4-speedLevel,所以speedLevel越大,速度越大
void ChangeSpeed()
{
switch (speedLevel)
{
case 0:
speedLevel = 1;
break;
case 1:
speedLevel = 2;
break;
case 2:
speedLevel = 0;
break;
default:
break;
}
}你问我难道老师没有写速度控制?当然写了,可老师的 PWM 是控制 EXT 接口的,我用不了。步进电机那种从 S1 到 S4 依次扫描下来的方式也做不到控制两个直流电机。那就自己写咯……
模式转换
// 在四种模式之间轮换:红外->蓝牙->避障->跟随->红外...
void SwitchModes()
{
switch (mode)
{
case 0:
ModeBTRemote();
break;
case 1:
ModeAuto();
break;
case 2:
ModeFollow();
break;
case 3:
ModeIRRemote();
break;
default:
break;
}
}红外和蓝牙遥控
红外遥控和蓝牙遥控都是一套逻辑,遥控器发送的命令数据和对应动作如下:
| 命令 | 动作 |
|---|---|
| 0xFA,0x00 | 停车 |
| 0xFA,0x01 | 前进 |
| 0xFA,0x02 | 左转 |
| 0xFA,0x03 | 右转 |
| 0xFA,0x04 | 后退 |
| 0xFA,0x05 | 鸣笛 |
| 0xFA,0x06 | 模式转换 |
| 0xFA,0x07 | 上锁解锁 |
| 0xFA,0x08 | 切换速度档位 |
红外遥控器就是另一块同样的板子,按下按键发送命令:
| 按键 | 动作 |
|---|---|
| Up | 前进 |
| Left | 左转 |
| Right | 右转 |
| Down | 后退 |
| Center | 停车 |
| Key3 | 不发给小车,用于切换Key1和Key2的模式 |
| Key1 模式0 | 鸣笛 |
| Key1 模式1 | 上锁解锁 |
| Key2 模式0 | 速度控制 |
| Key2 模式1 | 模式转换 |
红外遥控器的程序就是简单的按键事件和导航按键事件回调函数,就不贴出来了。
至于蓝牙遥控器……~~比卷,~~我又写了个安卓蓝牙遥控器,界面上的按键名就是对应功能。
小车的红外模式、蓝牙模式初始化:
// 红外遥控模式初始化
void ModeIRRemote()
{
Seg7Print(speedLevel, 10, 10, 10, 10, 10, 10, 0); // 默认模式下显示速度等级和默认指令
IrInit(NEC_R05d); // 设置红外协议基本时间片时长,接收到的数据在回调函数和 Remote() 中再进行内容校验
SetIrRxd(&rxd);
SetEventCallBack(enumEventIrRxd, IRCallback);
mode = 0;
}
// 蓝牙遥控模式初始化
void ModeBTRemote()
{
Uart2Init(9600, Uart2UsedforEXT); // 将串口2的波特率设为9600,用于 EXT
SetUart2Rxd(&rxd, 2, &rxdHead, 0); // 将接收到的数据存到 rxd,不在此处设置校验
// 放到 Remote() 中和红外接收的数据一样用 if 语句校验
SetEventCallBack(enumEventUart2Rxd, Uart2Callback);
mode = 1;
}接收到数据的回调函数:
// 红外接收到数据的回调函数
void IRCallback()
{
if (GetIrRxNum() != 0 && rxd[0] == rxdHead) // 简单校验,剩下的与运动状态有关的指令在 Remote() 中校验
{
Seg7Print(speedLevel, 10, 10, 10, 10, 10, 10, rxd[1]); // 数码管显示接收到的指令(0到8)
if (rxd[1] == 6)
VStop(), SwitchModes(); //IrPrint("CodeZone\n", sizeof("CodeZone\n"));
else if (rxd[1] == 7)
VStop(), flag = !flag; // 接收到7的时候进行上锁解锁操作
else if (rxd[1] == 8)
VStop(), ChangeSpeed();
}
}
// 蓝牙接收到数据的回调函数
void Uart2Callback()
{
if (rxd[0] == rxdHead) // 由于蓝牙初始化时不再设置校验,所以在这里简单校验
// 运动状态指令和红外模式一样在 Remote() 中校验
{
Seg7Print(speedLevel, 10, 10, 10, 10, 10, 10, rxd[1]); // 数码管显示接收到的指令(0到8)
if (rxd[1] == 6)
VStop(), SwitchModes(); //Uart2Print("CodeZone\n", sizeof("CodeZone\n"));
else if (rxd[1] == 7)
VStop(), flag = !flag; // 接收到7的时候进行上锁解锁操作
else if (rxd[1] == 8)
VStop(), ChangeSpeed();
}
}遥控模式下的控制:
/**
* 遥控:
* 现在 Remote() 由 TenMsCallback() 直接调用
* 这里不再包含上锁解锁等按下后只执行一次的操作
* 上述操作仅在接收数据事件的回调函数里判断并执行
*/
void Remote()
{
// 校验数据头
if (rxd[0] == rxdHead)
{
switch (rxd[1])
{
case 0:
VStop();
break;
case 1:
speedControl = 3 - speedLevel;
Forward();
break;
case 2:
speedControl = 4 - speedLevel;
TurnLeft();
break;
case 3:
speedControl = 4 - speedLevel;
TurnRight();
break;
case 4:
speedControl = 3 - speedLevel;
Backward();
break;
case 5:
SetBeep(440, 50);
break;
default:
break;
}
}
}避障
避障模式的初始化:
// 避障模式初始化
void ModeAuto()
{
EXTInit(enumEXTUltraSonic);
dirFlag = 0;
mode = 2;
}避障模式下的控制:
/**
* 显示距离数值,根据距离选择方向
* i 为距离值,单位是厘米
*/
void AutoMove(int i)
{
Seg7Print(speedLevel, 10, 10, 10,
(i / 1000) % 10, (i / 100) % 10, (i / 10) % 10, i % 10); // 显示速度等级、与障碍物间的距离
if (i > 20)
{
speedControl = 3 - speedLevel;
Forward();
dirFlag = !dirFlag;
}
else
{
speedControl = 4 - speedLevel;
SetBeep(1000, 10 + 2 * i); // 距离值过小时蜂鸣器报警
if (dirFlag)
TurnLeft();
else
TurnRight();
}
// 当前可以看作随机转向,复杂情况下可能导致小车找不到可行路径
}运动逻辑:
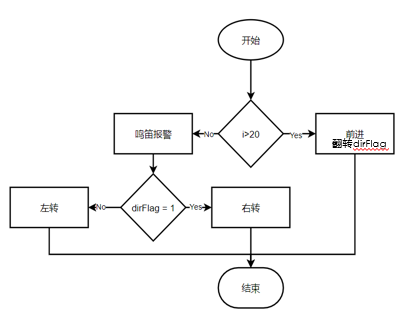
显然控制函数每 10ms 就可能被调用,这个流程图里就没有循环结构了。
不得不说这个运动逻辑很有问题。在这个逻辑下,小车遇到障碍时的转向算是随机的,但是在复杂情况下就可能使小车一会儿左转一会儿右转,最后转不出去。让小车始终转向一个方向会好些。
由于硬件限制,我装不上舵机,也装不上多个超声波模块,就只能做到让它避开正前方的障碍了。(连这一个超声波模块都要跟蓝牙模块抢 EXT 接口,换模式还得插拔……)
跟随
说是跟随,其实就是和障碍物保持一定距离罢了。
模式初始化:
// 跟随模式初始化
void ModeFollow()
{
EXTInit(enumEXTUltraSonic);
mode = 3;
}该模式下的运动控制:
/**
* 显示距离数值,保持一定距离
* i 为距离值,单位是厘米
*/
void Follow(int i)
{
Seg7Print(speedLevel, 10, 10, 10,
(i / 1000) % 10, (i / 100) % 10, (i / 10) % 10, i % 10); // 显示速度等级、与障碍物间的距离
if (i > 20)
{
speedControl = 3 - speedLevel;
Forward();
}
else if (i < 10)
{
speedControl = 3 - speedLevel;
SetBeep(1000, 10 + 4 * i); // 距离值过小时蜂鸣器报警
Backward();
}
else
{
VStop();
}
}这个运动逻辑就简单了:
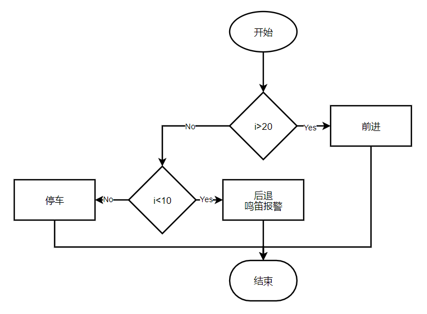
当然,“跟随”的目标也只限正前方。
总结
所以我得到了什么呢?一个有四种模式的三蹦子。甚好。最初的目标实现了,这下不会空虚寂寞了(笑)。这个设计也拿了院里竞赛的一等奖,爽到。
当然,这个三蹦子还有很多可以改进的地方,包括一些运动逻辑和硬件的改装等等……嗯,未来可期!